
はじめに
Unitree Go2を使用したメーカー側で提供されているアプリを用いて、Lidarで作成した地図をもとに自律走行させることができます。
3Dマッピング機能
Function > 3D Mappingを選択します
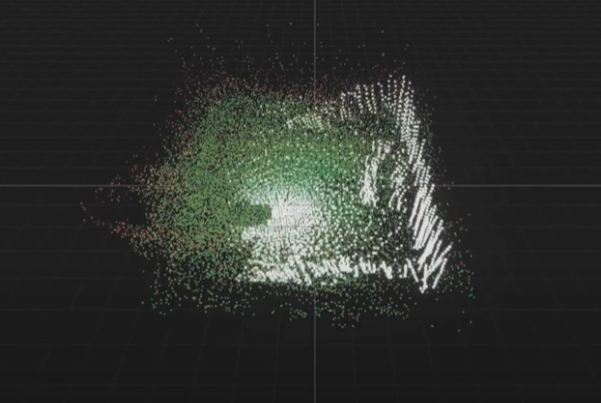
Go2 をゆっくり操作し、マッピングを作成します。
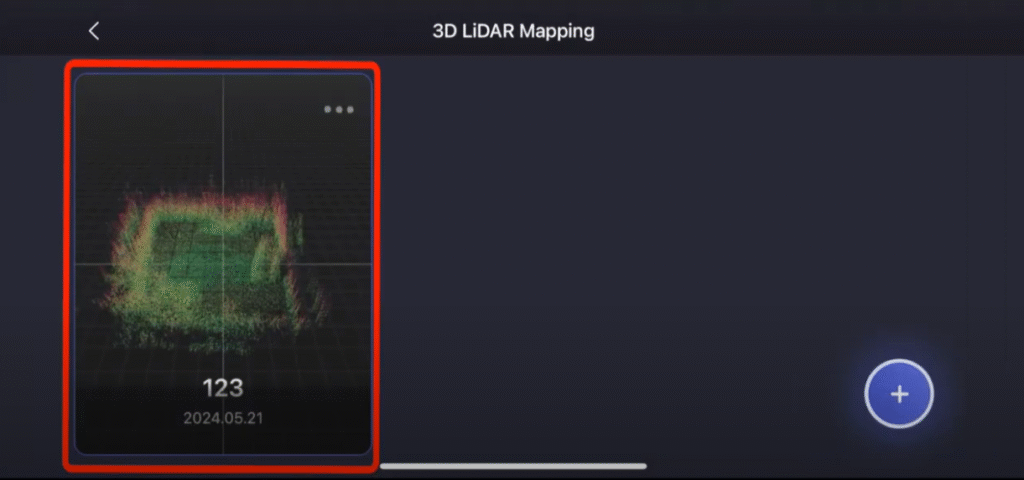
保存をして、作成したマッピングを呼び出します。
ナビゲーションモードをタッチし、初期化ボタンを押します。
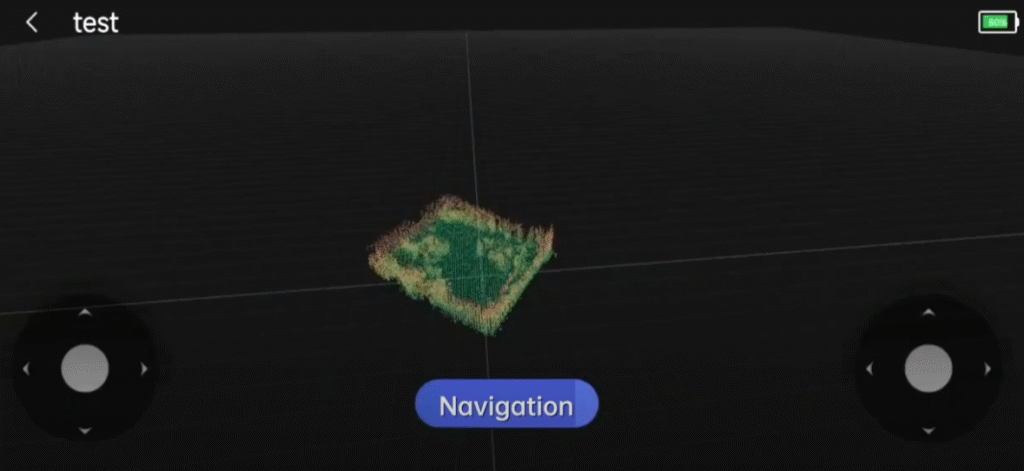
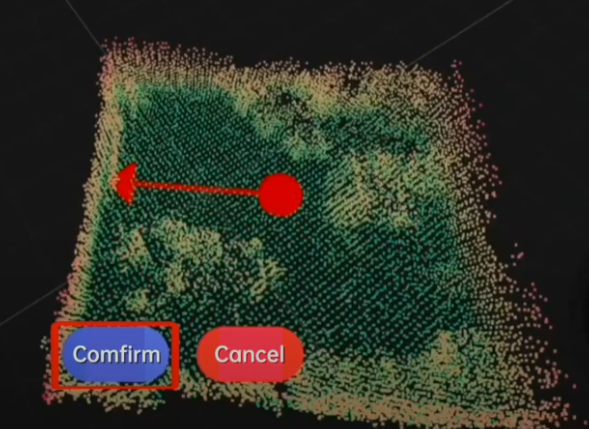
マップ上でのロボットの位置を長押しで指定し、向いている方向をドラッグすることで指定します。
スタートをタッチして、移動したい場所をタッチするとGo2が目標の場所まで動き始めます。

詳細はこちらをご覧ください。