
はじめに
G1は、二足歩行がゆえに不安定であるため、起動と停止方法をマニュアルに沿って行なう必要があります。
G1の開梱と初期セットアップ
Unitree G1 ヒューマノイド ロボットを適切に開梱し、操作できるように準備するには、以下の手順に従ってください。
開梱
- 箱を平らな面に置き、前面を上にします。
- 箱の上部を開き、ロボット全体を慎重に持ち上げます。
- ロボット本体、リモコン、充電器、付属品などすべてのコンポーネントを取り外します。
- 電源を入れる準備として、ロボットを安定した面に平らに置きます。
※開梱中に損傷しないように、すべてのコンポーネントを慎重に扱ってください。
電源投入前のチェックリスト
G1 の電源を入れる前に、次の点を確認してください。
- 純正の Unitree Robotics 部品のみを使用し、すべての部品が正常に動作していることを確認してください。
- 酒に酔っている場合、薬物の影響下にある場合、または集中できない場合はロボットを操作しないでください。
- 以下の点を理解しておいてください:
- 各歩行モードの特徴。
- 不安定になったり、制御不能になったりした場合の緊急ブレーキ方法。
- ロボットまたはそのコンポーネント内に異物(水、油、砂、土など)がないことを確認してください。
- リモコンとバッテリーパックが完全に充電されていることを確認してください。
G1の電源オン
※ G1が予期しない状態になった場合は、L1 + Aを押してください。ロボットは減衰モードに入り、ゆっくりと地面に落下します。
バッテリーパックの取り付け
- ロボットの側面にあるバッテリーボックスにバッテリーを挿入します。
- 電源スイッチがロボットの背面を向いていることを確認します。
- バッテリーが完全に挿入されない場合は、向きを調整してください。バッテリーインターフェースとバックルを損傷する恐れがあるため、無理に押し込まないでください。
- バッテリーがしっかりと取り付けられたことを示す「カチッ」という音が聞こえるか確認してください。バックルがしっかりと固定されていることを確認してください。
[方法1]座って電源を入れる
起動前の準備
状況が許せば、G1は座ったままの状態でもブートをサポートします。次の図のように、腕と脚を自然な位置に置いて椅子にG1を置きます。
電源オン
- バッテリーの電源ボタンを1回短く押します。
- 電源ボタンを2秒以上押し続けると、バッテリーの電源がオンになります。
起動成功
- G1 がゼロトルク状態になるまで約1 分間待ちます。
- 押すとダンピングモードに入ります。
L1 + A - G1 の肩を持って押すと、準備状態になります。
L1 + UP - G1 がまっすぐに伸びて立ち上がったら、次のボタンを押すことができます。
R1 + Xまたは操作制御状態に入ります。R2 + X
[方法 2]ハングアップして電源を入れる
次の手順では、Unitree G1 ヒューマノイド ロボットを吊り下げ、準備し、電源を入れる手順を説明します。
起動前の準備
- G1を地面にしっかりと置きます。
- ロボットの両肩にある特殊なサスペンションバックルにロープを通して、デッドノットでしっかりと結びます。
- ロープを保護フレームの吊り下げバックルに取り付けます。
- サポートを調整して G1 を徐々に持ち上げ、ロボットの本体が完全に吊り下げられ、足が地面に触れないようにします。
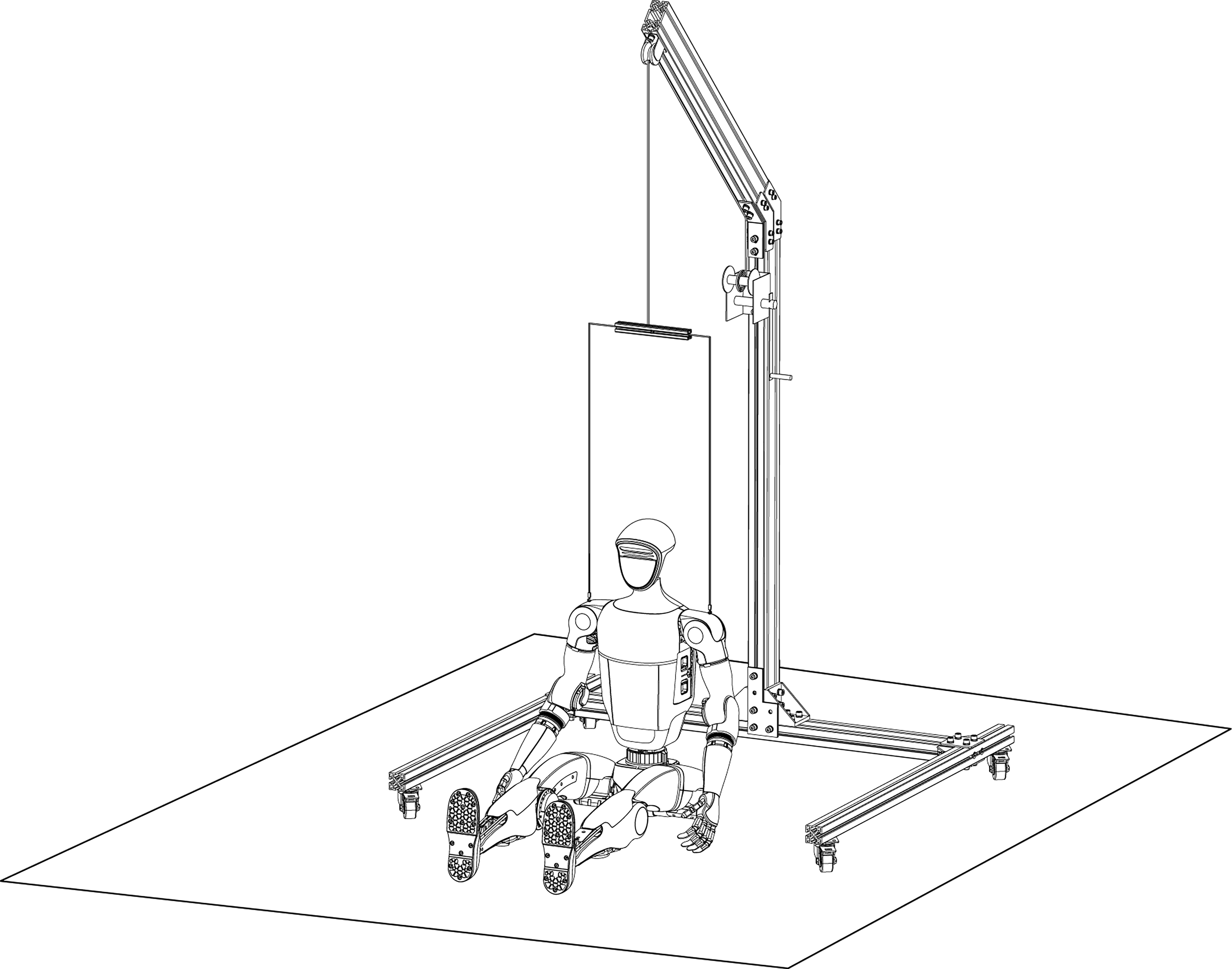
体の配置
- ぶら下がっている間、ロボットの腕と脚を自然な位置に置きます。
- 続行する前に、ジョイントが絡まっていないことを確認してください。
ロボットの起動
- バッテリーの電源ボタンを1回短く押します。
- 電源ボタンを2秒以上押し続けると、バッテリーの電源がオンになります。
ブートプロセス
- 起動プロセスには約1 分かかります。
- すべてのジョイントがゼロトルク状態になると、初期化は成功します。
- リモコンを使用する:
- 押すとダンピングモードに入り、制御のロックが解除されます。
L1 + A - 押すと準備状態になります。
L1 + UP
- 押すとダンピングモードに入り、制御のロックが解除されます。
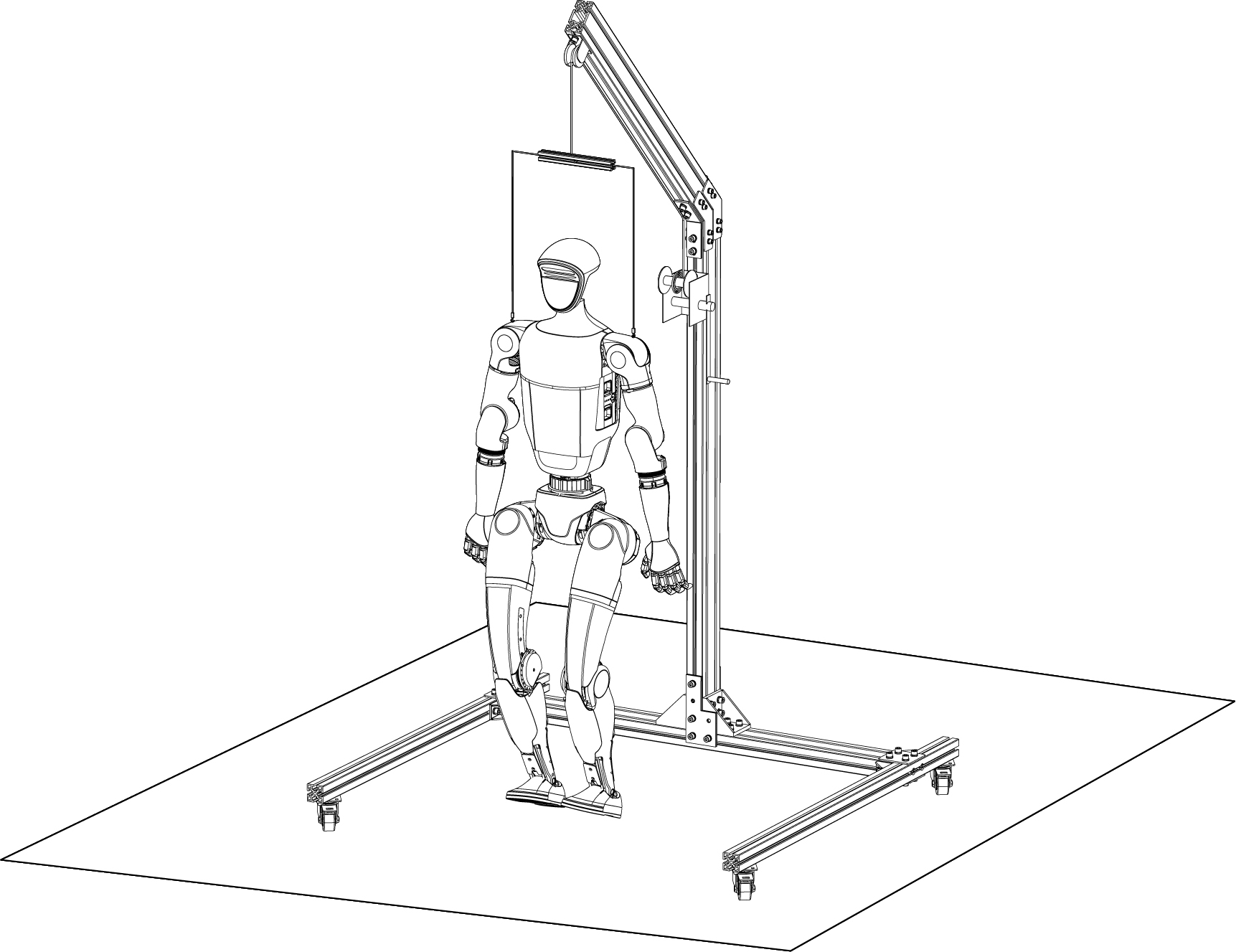
ロボットの下降と起動
- G1 の足が地面に着くまで、吊り下げロープを徐々に下げます。
- リモコンの を押します。
R1 + X- 制御プログラムが起動し、G1 が準備状態から動作状態に移行します。
- ロボットの動きを安定させます。
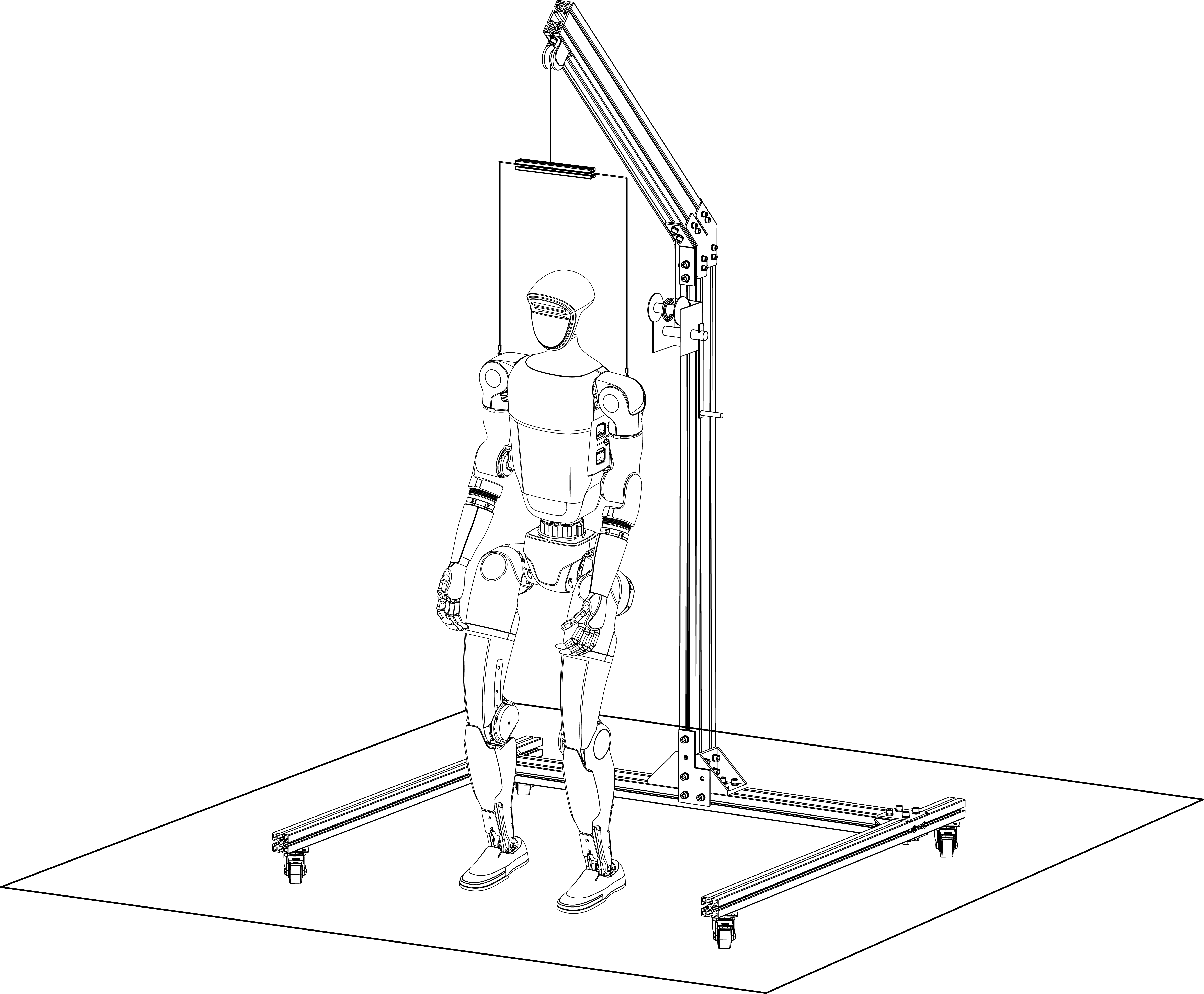
吊り下げロープの解除
- G1が安定したら、サスペンションフックを完全に解放します。
- リモコンの左右のジョイスティックを使用して、 G1 の動きを制御します。
- リモコンのSTARTを押すと、立っている状態と歩いている状態が切り替わります。
[方法3]地面から始める
G1 ロボットを地上から安全に起動するには、次の手順に従ってください。
起動前の準備
- G1 を上向きにして地面にしっかりと置きます。
- 続行する前に、ジョイントが絡まっていないことを確認してください。
- 偶発的な落下や損傷を防ぐため、ロボットが安定した滑りにくい表面上にあることを常に確認してください。
ロボットの起動
- バッテリーの電源ボタンを1回短く押します。
- 電源ボタンを2秒以上押し続けると、バッテリーの電源がオンになります。
ブートプロセス
- 起動プロセスには約1 分かかります。
- すべてのジョイントがゼロトルク状態になると、初期化は成功します。
リモコンの使用
- 押すとダンピングモードに入り、制御のロックが解除されます。
L1 + A - 押すと横臥・起立モードが起動します。
L1 + X
注意
ロボットが自力で立ち上がるので、安全な距離を保ってください。
次の GIF に示すように、G1 は地面から上昇します。

緊急停止
G1が予期しない状態になった場合は、L1 + Aを押してください。ロボットは減衰モードに入り、ゆっくりと地面に落下します。
注意
操作中の損傷や事故を防ぐために、サスペンションのセットアップが安定していて安全であることを常に確認してください。
G1 電源オフ
さまざまなシナリオで G1 ロボットを安全にオフにするには、次の手順に従ってください。
[方法1] 座位シャットダウン
- G1ロボットが座るのを手伝うために椅子の後ろに立ち、ロボットは椅子の前に立ち、椅子から背を向けます。ロボットが静止していることを確認してください。
- 肩の後ろを押さえながらリモコンを押して、G1 が座れるようにします。
L1 + LEFT - 電源をオフにするには、次の手順を実行します。
- 押すとダンピングモードに入ります。
L1 + A - シャットダウンするには、バッテリー電源スイッチキーを 2 秒以上押し続けます。
シャットダウン後:
- ボディの配置要件に応じて、ロボットの腕と足の関節の制限を調整します。
- G1を長期間使用しない場合は、バッテリーパックを取り外してください。
- バッテリーパックのクリップを両手で押さえながら、バッテリーをゆっくりと取り外します。
[方法2] ハングシャットダウン
- G1が保護フレームに再び吊り下げられ、固定されていることを確認します。ロープはロボットに張力をかけ続ける必要があります。
- 電源をオフにするには、次の手順を実行します。
- 押すとダンピングモードに入ります。
L1 + A - シャットダウンするには、バッテリー電源スイッチキーを 2 秒以上押し続けます。
シャットダウン後:
- ロボットの腕と足の関節の制限を調整して、適切に保管します。
- G1 を長期間使用しない場合は、上記のようにバッテリー パックを取り外してください。
[方法3] スタンディングシャットダウン(非推奨)
この方法は安全上のリスクを伴う可能性があるため、推奨されません。怪我や損傷を避けるため、十分に注意してください。
- G1をしっかりと保持します。
- 片方の手を足の間に置きます。
- もう一方の手は肩の後ろにあるブラケットを持ちます。
- 補助が必要な場合は、押すとダンピングモードになります。ロボットはバランスを崩すので、慎重に地面に下ろしてください。
L1 + A - 体全体が地面に平らに横たわっていることを確認します。
- シャットダウンするには、バッテリー電源スイッチキーを 2 秒以上押し続けます。
シャットダウン後:
- ロボットの腕と足の関節の制限を調整して、適切に保管します。
- G1 を長期間使用しない場合は、上記のようにバッテリー パックを取り外してください。
- 突然の落下や損傷を防ぐため、G1 をシャットダウンするときは必ず座った状態または吊り下げた状態でシャットダウンしてください。
- 怪我を防ぐために、ロボットの可動関節の近くに手を置かないようにしてください。