
初めに
前回の記事でUnitree Go2の学習環境を整えたので、どのようにコードを変更していけばいいかを説明していきたいと思います。
そもそも何を変更すればいいの?
基本的にIsaacLabでは、
python/scripts/skrl/train.py --task=$YOUR_TASK # 訓練
python/scripts/skrl/play.py --task=$YOUR_TASK # プレイの二つのスクリプトを使用するのですが、この二つのコードを直接いじるわけではない点にまず注意が必要です。
▼ train.py の中身の詳細(クリックで展開)
@hydra_task_config(args_cli.task, agent_cfg_entry_point)
def main(env_cfg: ManagerBasedRLEnvCfg | DirectRLEnvCfg | DirectMARLEnvCfg, agent_cfg: dict):
"""Train with skrl agent."""
# override configurations with non-hydra CLI arguments
env_cfg.scene.num_envs = args_cli.num_envs if args_cli.num_envs is not None else env_cfg.scene.num_envs
env_cfg.sim.device = args_cli.device if args_cli.device is not None else env_cfg.sim.device
if args_cli.distributed and args_cli.device is not None and "cpu" in args_cli.device:
raise ValueError(
"Distributed training is not supported when using CPU device. "
"Please use GPU device (e.g., --device cuda) for distributed training."
)
if args_cli.distributed:
env_cfg.sim.device = f"cuda:{app_launcher.local_rank}"
if args_cli.max_iterations:
agent_cfg["trainer"]["timesteps"] = args_cli.max_iterations * agent_cfg["agent"]["rollouts"]
agent_cfg["trainer"]["close_environment_at_exit"] = False
if args_cli.ml_framework.startswith("jax"):
skrl.config.jax.backend = "jax" if args_cli.ml_framework == "jax" else "numpy"
if args_cli.seed == -1:
args_cli.seed = random.randint(0, 10000)
agent_cfg["seed"] = args_cli.seed if args_cli.seed is not None else agent_cfg["seed"]
env_cfg.seed = agent_cfg["seed"]
log_root_path = os.path.join("logs", "skrl", agent_cfg["agent"]["experiment"]["directory"])
log_root_path = os.path.abspath(log_root_path)
print(f"[INFO] Logging experiment in directory: {log_root_path}")
log_dir = datetime.now().strftime("%Y-%m-%d_%H-%M-%S") + f"_{algorithm}_{args_cli.ml_framework}"
print(f"Exact experiment name requested from command line: {log_dir}")
if agent_cfg["agent"]["experiment"]["experiment_name"]:
log_dir += f'_{agent_cfg["agent"]["experiment"]["experiment_name"]}'
agent_cfg["agent"]["experiment"]["directory"] = log_root_path
agent_cfg["agent"]["experiment"]["experiment_name"] = log_dir
log_dir = os.path.join(log_root_path, log_dir)
dump_yaml(os.path.join(log_dir, "params", "env.yaml"), env_cfg)
dump_yaml(os.path.join(log_dir, "params", "agent.yaml"), agent_cfg)
resume_path = retrieve_file_path(args_cli.checkpoint) if args_cli.checkpoint else None
if isinstance(env_cfg, ManagerBasedRLEnvCfg):
env_cfg.export_io_descriptors = args_cli.export_io_descriptors
env_cfg.log_dir = log_dir
env = gym.make(args_cli.task, cfg=env_cfg, render_mode="rgb_array" if args_cli.video else None)
if isinstance(env.unwrapped, DirectMARLEnv) and algorithm in ["ppo"]:
env = multi_agent_to_single_agent(env)
if args_cli.video:
video_kwargs = {
"video_folder": os.path.join(log_dir, "videos", "train"),
"step_trigger": lambda step: step % args_cli.video_interval == 0,
"video_length": args_cli.video_length,
"disable_logger": True,
}
env = gym.wrappers.RecordVideo(env, **video_kwargs)
env = SkrlVecEnvWrapper(env, ml_framework=args_cli.ml_framework)
runner = Runner(env, agent_cfg)
if resume_path:
runner.agent.load(resume_path)
runner.run()
env.close()
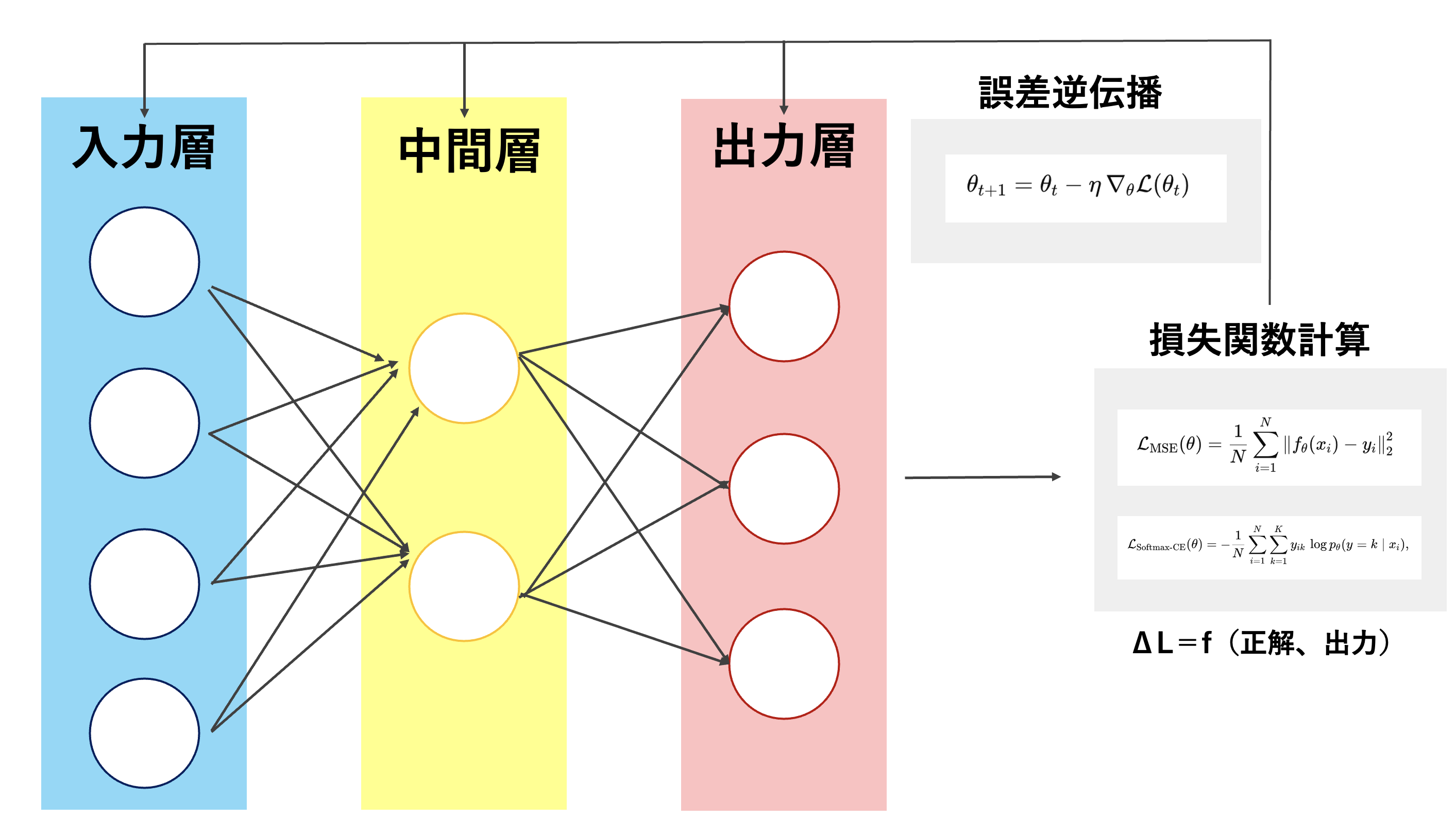
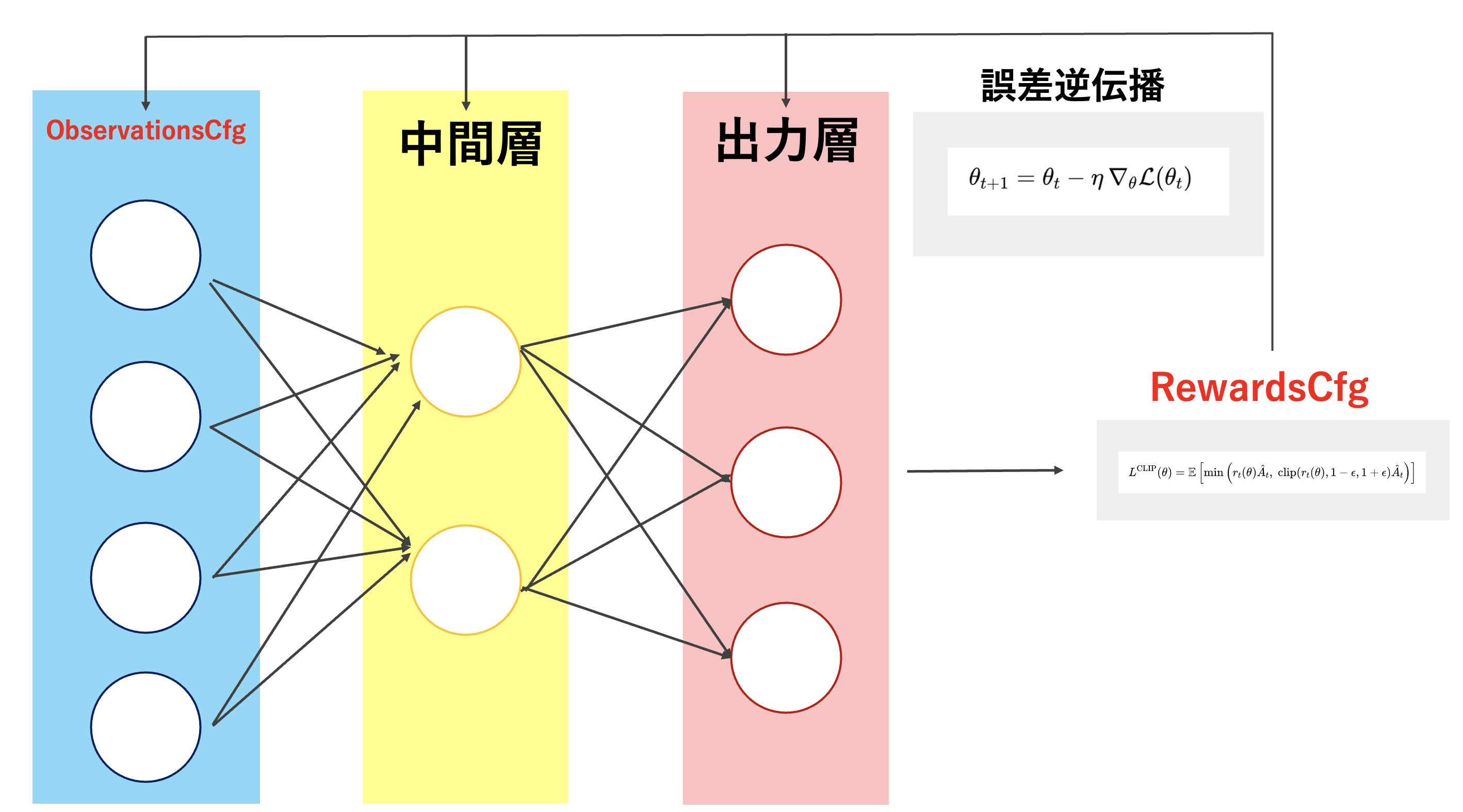
強化学習フローのイメージ
それぞれのCfgの説明
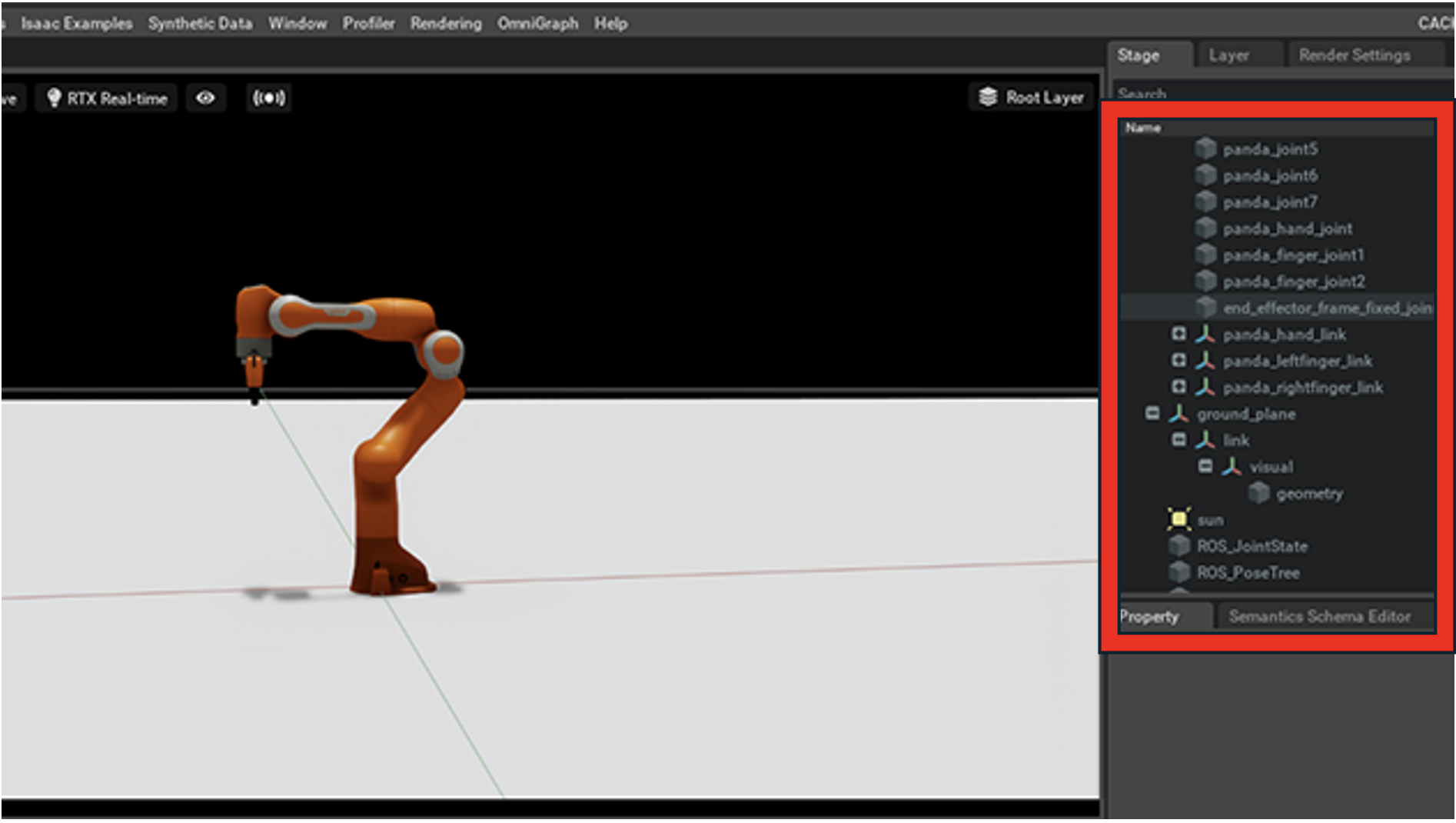
InteractiveSceneCfg
UnityのHierarchy + Inspector相当。
ObservationsCfg
ニューラルネットの入力層。
RewardsCfg
損失関数相当。
TerminationCfg

CurriculumCfg
カリキュラム学習用設定。
終わりに
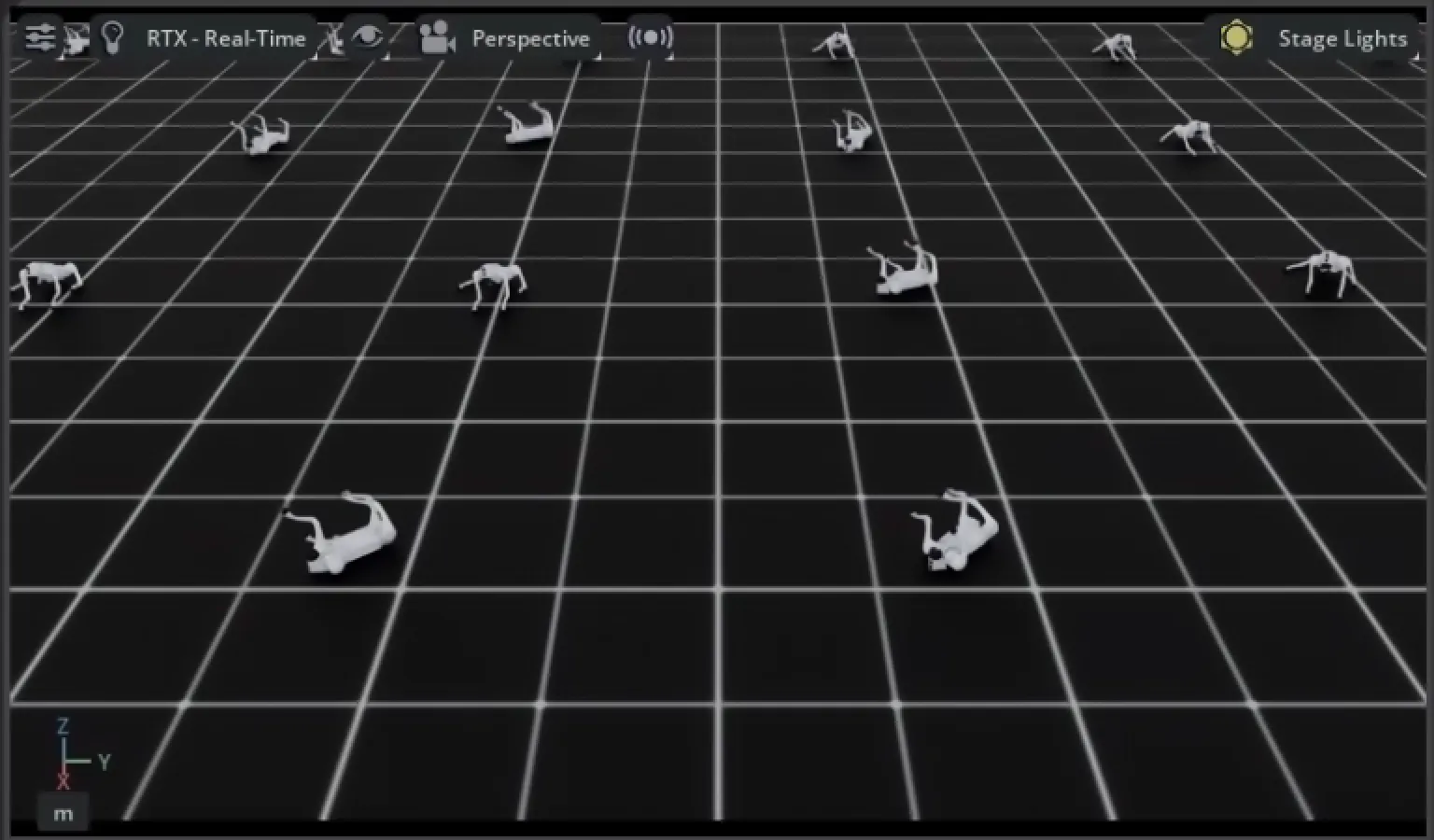
ここまでで基本的な強化学習の設定手法が理解できてきたので、いよいよ実際にUnitree Go2を強化学習していきたいと思います!
前回の記事
この記事は
[Isaac Lab 2025】コードベースで読み解くUnitree Go2強化学習の実装と理解:準備編]
の続きです!