
リモコンの基本操作
リモート コントロールを使用してジョイスティックで G1 ロボットを操作する場合は、次の制御方法に従ってください。
左ジョイスティック
- 前進する:

- 後方に押す:
- 右ジョイスティック
- 右折:
- ジョイスティックを右に押す
- 左折:
- ジョイスティックを左に押す
コンセプトの説明
G1ロボットには複数の動作モードがあります。各モードの詳細な説明は以下のとおりです。
| モード | 説明 |
|---|---|
| ゼロトルクモード | すべてのモーターがアクティブな動きを停止します。ロボットを手動で動かしても減衰は感じられません。 |
| ダンピングモード | モーターはアクティブな動きを停止しますが、抵抗を提供し、準備モードへの移行を可能にします。 |
| 準備モード | ロボットは5秒以内に動作の準備姿勢をとります。 |
| スクワットモード | ロボットはゆっくりとしゃがんだ姿勢に移行します(バランス制御なし)。 |
| 座席モード | ロボットは着席姿勢をとります(バランス制御なし)。 |
| モーションモード | リモコンによるモーションコントロールを有効にします。 |
| 連続歩行モード | ロボットは止まることなく継続的に歩き続けます。 |
| スタンディングモード | ロボットはバランスを保ちます。ジョイスティックが作動したりバランスが崩れたりすると、ロボットは歩きます。 |
| デバッグモード | SDK開発に使用されます。コマンドの競合を防ぐため、モーションコントロールは一時停止されます。 |
重要
G1ロボットの現在の歩行モードでは階段の登り降りはサポートされていません。損傷を防ぐため、階段の登り降りは避けてください。
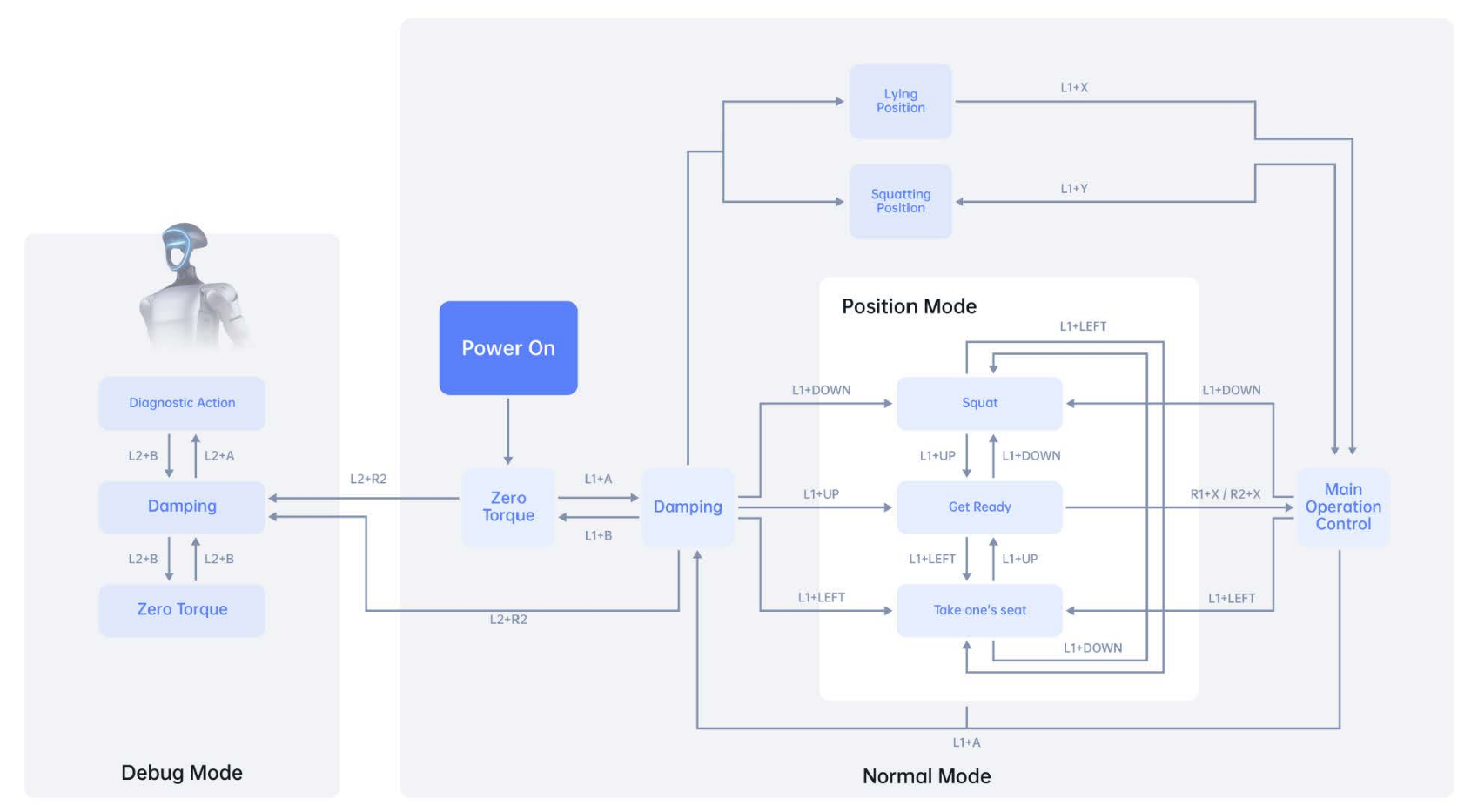
モード切り替え
ロボットは、特定のコマンドを使用してモード間のシームレスな移行を可能にします。
重要
- しゃがんだ姿勢 (L1 + Y) を使用した後にメイン操作制御モードに戻るには、次の手順に従います。
- L1 + Aを使用してダンピング モードに入ります。
- L1 + Yを使ってメイン操作制御モードに切り替えます。
主な説明
姿勢モード
さまざまな姿勢モードを切り替えるには、次のボタンの組み合わせを使用します。
| モード | ボタンの組み合わせ | 説明 |
|---|---|---|
| デバッグモード | L2を押しながらR2をクリック | テストおよび開発のためにデバッグ モードに入ります。 |
| ゼロトルクモード | L1を押しながらBをクリック | ゼロトルクモードに切り替えます。 |
| ダンピングモード | [1] L1を押しながらAをクリック | スムーズな動きのためにダンピングモードを有効にします。 |
| ロックスタンド | [2] L1を押しながら上をクリック | ロボットを直立姿勢で固定します。 |
| 着席モード | [4] L1を押しながら左クリック | 座った姿勢に切り替えます。 |
| スクワットモード | L1を押しながら下をクリック | スクワット姿勢に移行します。 |
| 横たわったり立ったり | [5] L1を押しながらXをクリック | 横臥姿勢と立位姿勢を切り替えます。 |
| スクワットスイッチ | [6] L1を押しながらYをクリック | しゃがんだ姿勢を交互に繰り返します。 |
インタラクティブ機能
G1ロボットは様々なインタラクティブなジェスチャーをサポートしています。以下の表を参考にしてください。
| ジェスチャー | ボタンの組み合わせ | 説明 |
|---|---|---|
| 手を振る | SELECTを押しながらYをクリック | ロボットが手を振ります。 |
| ハンドシェーク | SELECTを押しながらAをクリック | ロボットが握手ジェスチャーを実行します。 |
| 振り返って手を振る | SELECTを押しながらXをクリック | ロボットが向きを変えてユーザーに向かって手を振ります。 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [3] R2 + X(ランコントロール) | ボタンの組み合わせ |
| リフトの高さを上げる | Bをクリック |
| 脚上げ高さを下げる | Aをクリック |
| 身長を伸ばす | Yをクリック |
| 身長を低くする | Xをクリック |
| ゆっくり走る | R1 + 左ロッカー |
| 速いランニング | R2 + 左ロッカー |
| [3] R1 + X(メイン操作コントロール) | ボタンの組み合わせ |
| 歩き続ける(非推奨) | スタートをダブルクリック |
| 立っている | スタートをクリック |
| 低速モード | L2をダブルクリック |
| 高速モード | L1をダブルクリック |
| オフセット補償 | 左オフセット:R1を押しながらクリック – →右オフセット: R1を押しながらクリック – ←前方オフセット: R1を押しながらクリック↓後方オフセット R1を押しながらクリック↑ |
{kind=link}
{kind=link}
| [7] R1 + Y(3自由度腰部構造のみ使用) | ボタンの組み合わせ |
| 歩き続ける(非推奨) | スタートをダブルクリック |
| 立っている | スタートをクリック |
| 低速モード | L2をダブルクリック |
| 高速モード | L1をダブルクリック |
| オフセット補償 | 左オフセット:R1を押しながらクリック – →右オフセット: R1を押しながらクリック – ←前方オフセット: R1を押しながらクリック↓後方オフセット R1を押しながらクリック↑ |
| [8] R2 + Y(3自由度腰部構造のみ使用) | ボタンの組み合わせ |
| リフトの高さを上げる | Bをクリック |
| 脚上げ高さを下げる | Aをクリック |
| 身長を伸ばす | Yをクリック |
| 身長を低くする | Xをクリック |
| 歩き続ける(非推奨) | スタートをクリック |
| ウエストコントロール | SELECT + 右ロッカーを押し続ける |
重要
- 仰向けまたはしゃがんだ姿勢でのスタートは、平らで硬い地面でのみ適しています。これらのモードを不均一な地面で使用すると、不安定になり、損傷につながる可能性があります。
- 器用な手作業用の機器を装備している場合は、繊細な部品の損傷を防ぐため、横になったりしゃがんだりした姿勢で作業を開始しないでください。
ブートプロセス
通常のブートプロセス
- ブート -> [1] -> [2] -> [3] -> デモ -> [4] (チェアシート) -> 電源を切る。
ライイングブートプロセス
- ブーツデバイスの股部分が地面に対して平らになっていることを確認します。
- ブート -> [1] -> [5] -> デモ -> [6] -> 電源を切る。
スクワットブーツのプロセス
- しゃがんだ姿勢から始めます。
- ブート -> [1] -> [6] -> デモ -> [6] -> 電源を切る。
3自由度ウエスト構造
- [7],[8] 3自由度腰部構造にのみ使用。R1 + Yモードの使用を推奨
リモートコントロールのタイムアウト
- R3リモコンがロボットまたはスマートフォンに接続されていない場合、ロボットの電源を入れた後、10分間操作がないと自動的にシャットダウンします。再接続するには、ロボットの電源を再度入れてください