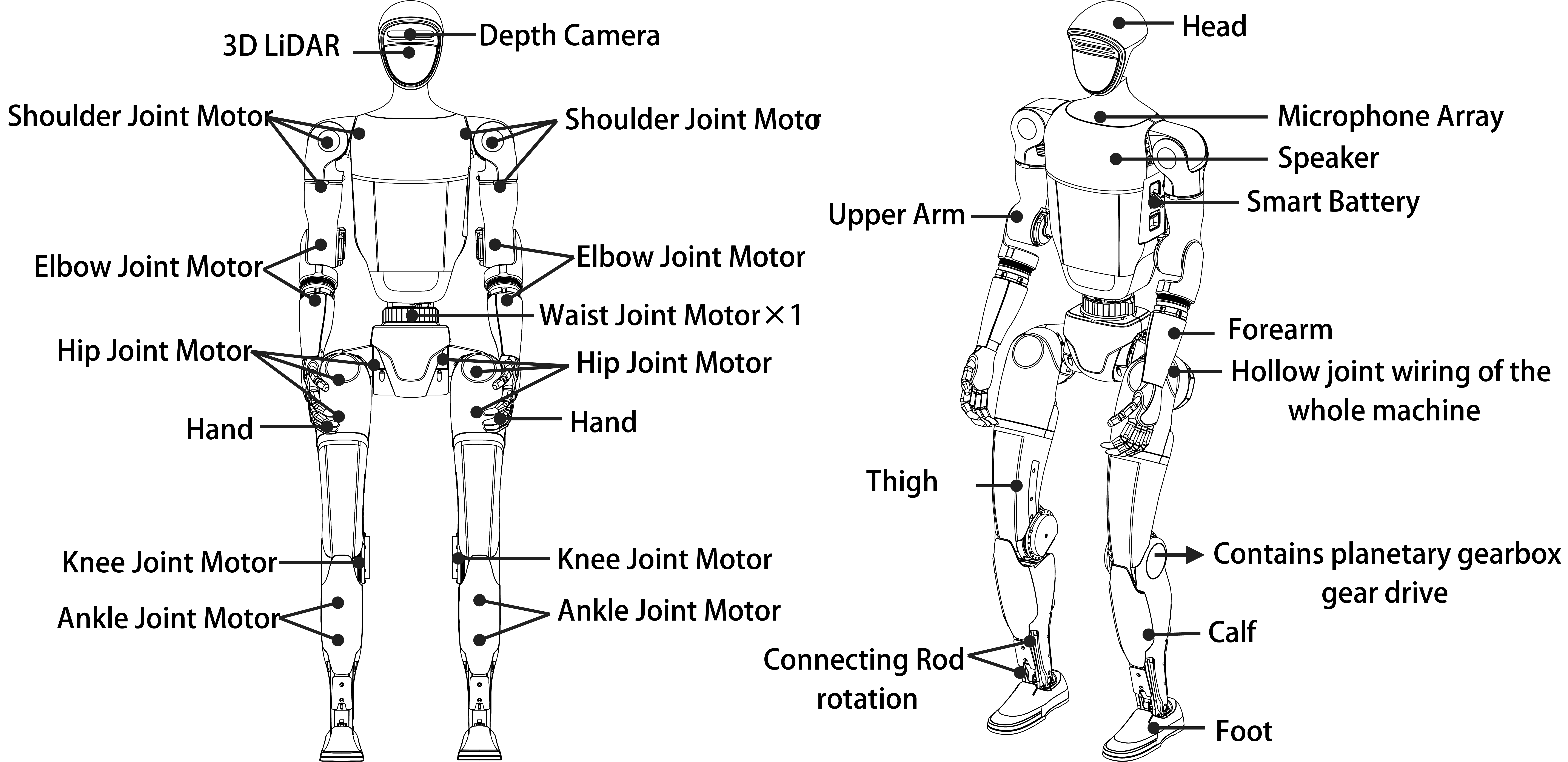
G1の概要
G1ロボットは上半身と下半身に分かれており、それぞれに複数の自由度が備わっています。片腕は肩関節、上腕関節、肘関節を含む5自由度、片脚は股関節、脚関節、膝関節、足首関節を含む6自由度です。腰部には腰椎関節を含む1自由度が設けられています。
G1 ベーシック バージョンは合計 23 の自由度を提供し、ジョイント モーターによる正確な動作と姿勢の制御を可能にします。
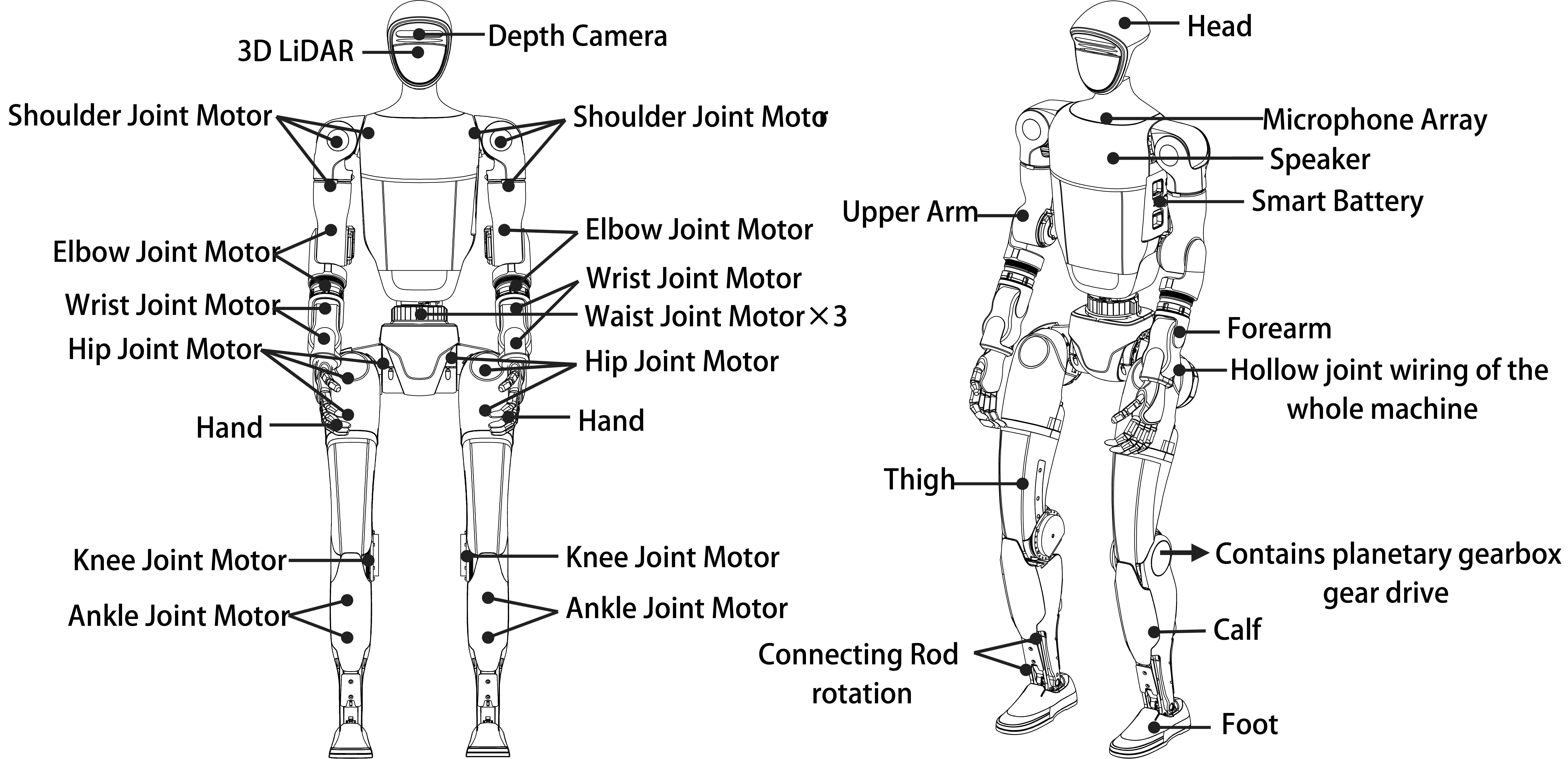
G1-Eduの概要
G1-EDUバージョンはG1ベーシックモデルをベースに、教育・研究用途向けに機能を拡張しています。基本構成はG1と同じですが、自由度を高めるオプションも含まれています。
オプションのアップグレードには、7自由度と2自由度の手首を備えた器用なハンドが含まれており、操作能力が向上します。また、腰部も2自由度を追加することで柔軟性を高めることができます。構成によっては、G1-EDUは最大43自由度まで操作できるため、複雑なタスクにも対応できる高い汎用性を備えています。
G1 3本指の器用な手
| パラメータ | 仕様 |
| レンダリング画像 | 4 |
| 動作電圧 | 12~58V |
| 知覚範囲 | 10グラム – 2500グラム |
| 自由度 | 合計: 7 – 親指: 3 アクティブ自由度 – 人差し指: 2 アクティブ自由度 – 中指: 2 アクティブ自由度 |
| 関節角度 | 親指: 0°~+100°、-35°~+60°、-60°~+60° 人差し指と中指: 0°~+90°、0°~+100° |
| アレイセンサーの数 | 9 |
G1 5本指の器用な手
RH56シリーズInspireロボットハンド(RH56BFXおよびRH56DFXモデル)は、G1などのヒューマノイドロボットとのシームレスな統合を目的として設計されています。RS485通信インターフェースをサポートし、ROS(Robot Operating System)を含む一般的なロボットプラットフォームと完全な互換性があります。精密な制御、6自由度、12関節設計により、精度と適応性が求められる作業に適した高性能な器用さを実現します。RH56シリーズは、一貫した再現精度(±0.20mm)、調整可能なグリップ力、柔軟な動作範囲などの機能により信頼性の高い動作を保証し、ヒューマノイドロボットをはじめとする高度なロボットシステムに最適です。

| パラメータ | RH56BFX仕様 | RH56DFX仕様 |
| 制御インターフェース | RS485 | RS485 |
| 自由度 | 6 | 6 |
| 関節の数 | 12 | 12 |
| 重さ | 540グラム | 540グラム |
| 動作電圧 | DC24V±10% | DC24V±10% |
| 静止電流 | 0.20A | 0.20A |
| ピーク電流 | 2A | 2A |
| 再現性 | ±0.20mm | ±0.20mm |
| 最大の親指グリップ | 6N | 15N |
| 最大の手のひらと指のグリップ | 4N | 10N |
| 強制解決 | 0.50N | 0.50N |
| 親指外側**回転範囲 | > 65° | > 65° |
| 親指の横方向**回転速度 | 235°/秒 | 107°/秒 |
| 親指の曲げ速度 | 150°/秒 | 70°/秒 |
| 手のひら指の曲げ速度 | 570°/秒 | 260°/秒 |
G1レーダーとカメラの視野角
G1 ロボットには、LIVOX-MID360 レーザー レーダーや D435i 深度カメラなどの高度なセンサー システムが搭載されており、これらが連携して優れた環境認識と空間認識を提供します。
LIVOX-MID360 レーザーレーダー
LIVOX-MID360レーザーレーダーはG1ヘッドに統合されており、卓越した環境検知能力を提供します。このLIDARは全方向・全角スキャン技術を採用し、最大360°の水平視野角(FOV)、最大垂直角59°を実現します。これらの機能により、G1は正確かつリアルタイムの環境データを取得し、高解像度の点群情報を生成します。システムは周囲の物体を迅速に検知・測定し、正確かつ包括的な空間認識を実現します。
D435i デプスカメラ
G1はD435i深度カメラを搭載し、視覚認識能力を強化しています。このカメラにより、ロボットは周囲の環境をより正確に認識・解釈し、正確な空間認識と障害物検知が可能になります。これらの機能により、G1は環境とのインテリジェントかつ柔軟なインタラクションを実現し、様々なシナリオに効果的に適応することができます。
MID360とD435iを組み合わせた視野角
LIVOX-MID360レーザーレーダーとD435i深度カメラの統合により、統合された視野角が実現し、G1ロボットは比類のない環境認識と適応性を実現します。これらのセンサーを組み合わせることで、G1は多様なタスクや変化の激しい環境下でも効果的に動作することができます。
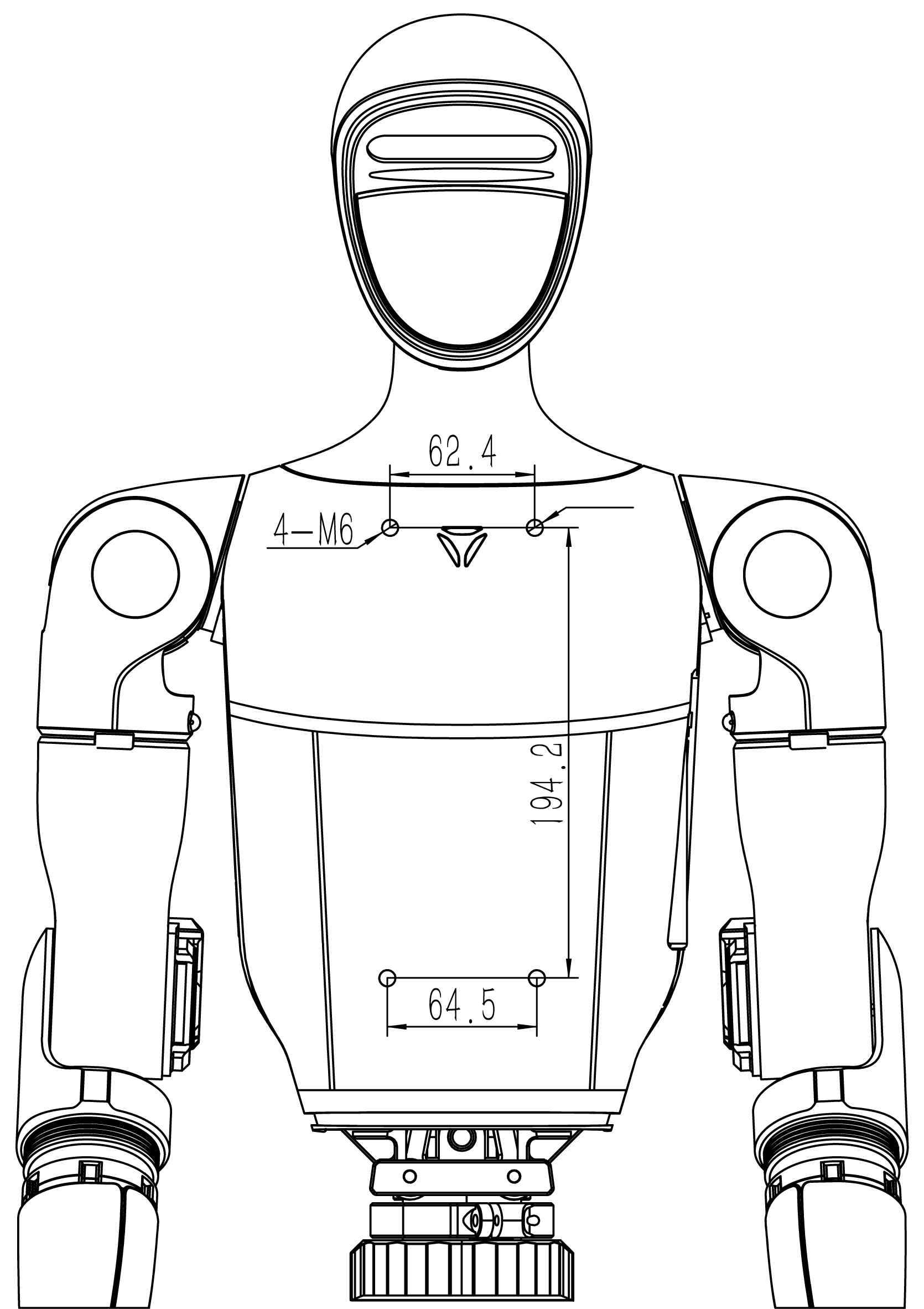
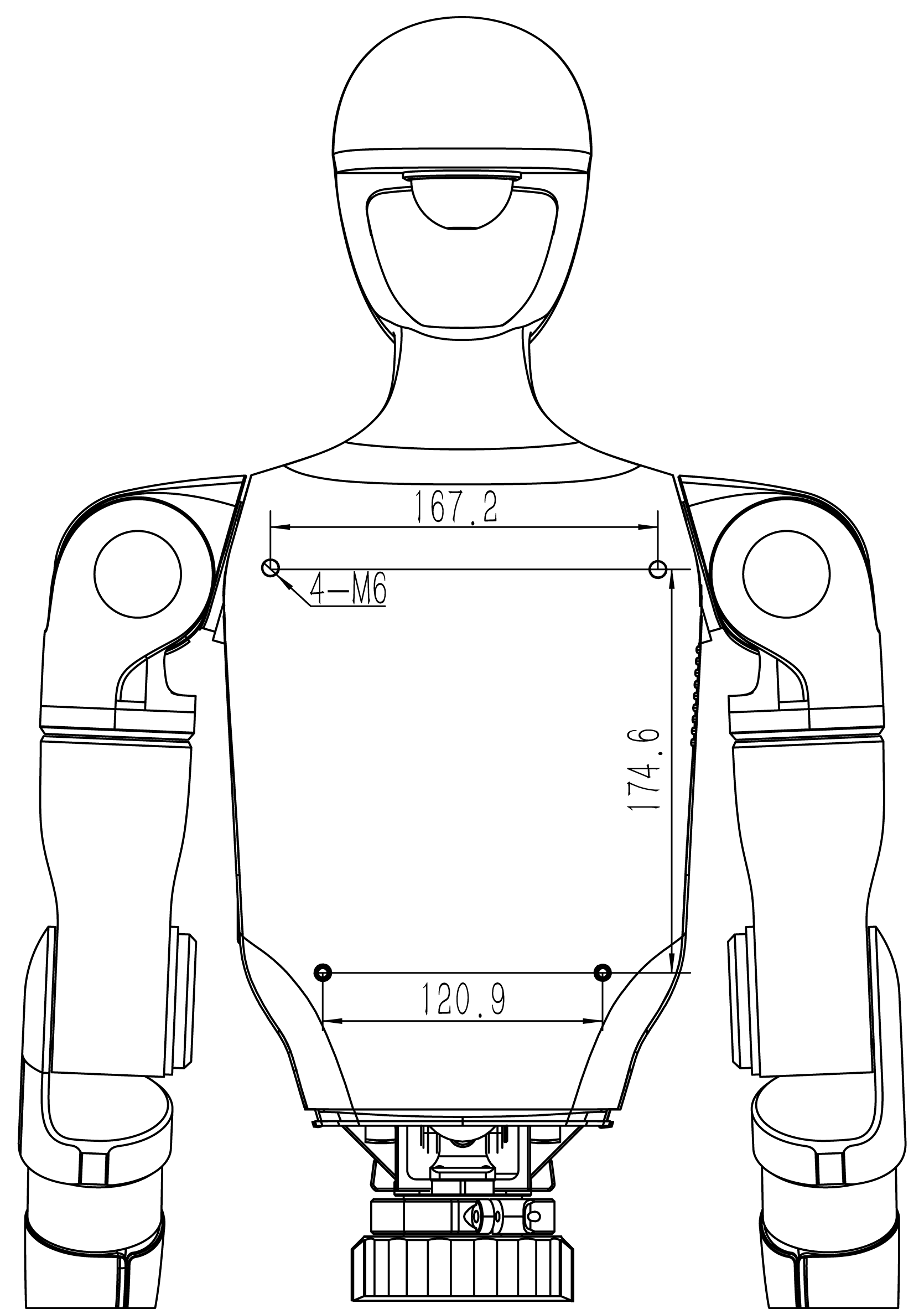
G1取り付け穴
単位:mm
G1 取り付け穴を利用するには、取り付け前に穴を覆っているラベルが剥がされていることを確認してください。
{kind=link}
{kind=link}
G1電気インターフェース
G1ロボットの首の後ろには、ボディジョイントモーター、センサー周辺機器、ネットワークポートなどを接続するための様々な電気インターフェースが装備されています。この設計により、デバッグ、トラブルシューティング、二次開発が簡素化され、システムの汎用性と使いやすさが向上しています。
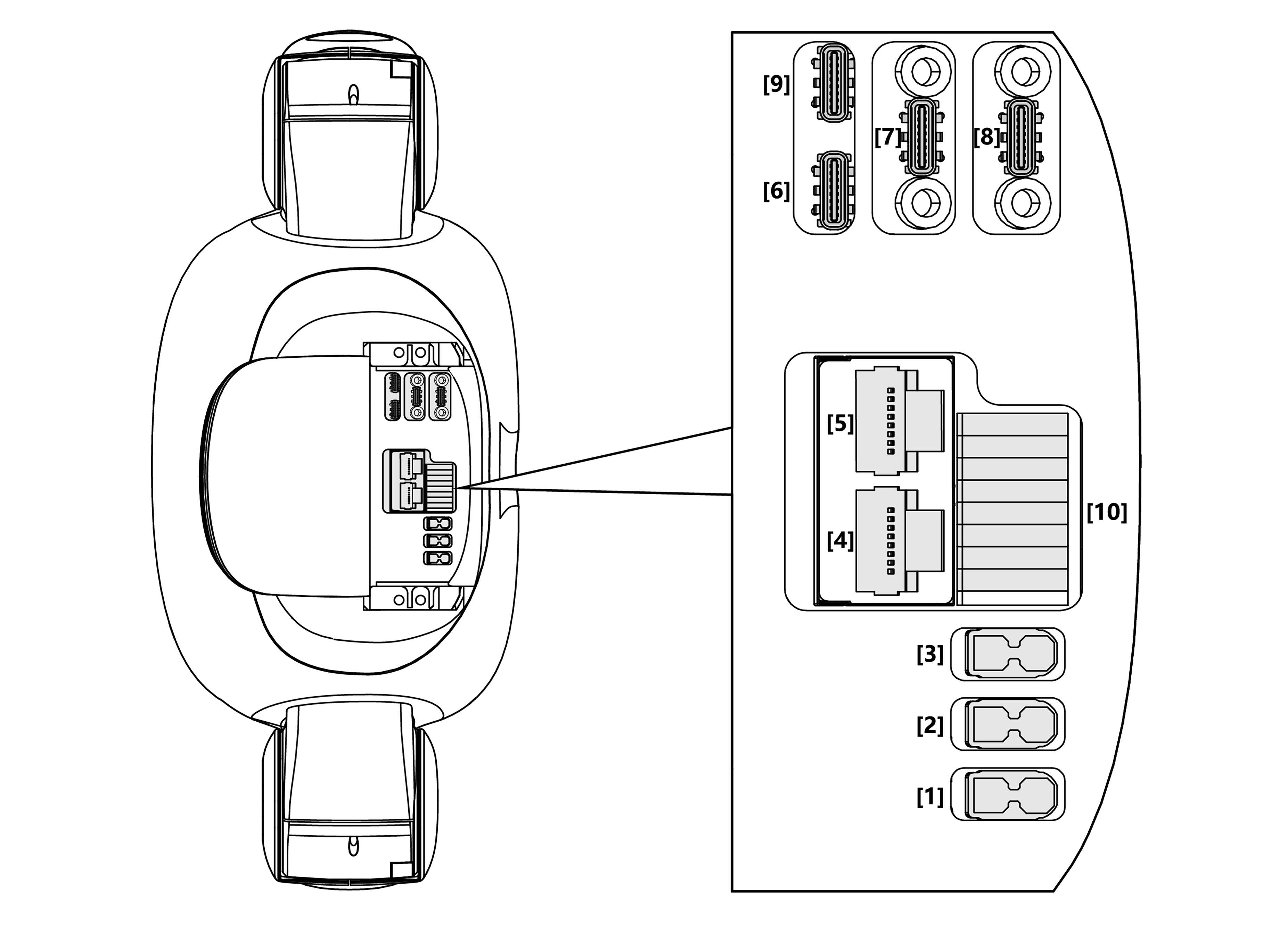
以下にコネクタとそれぞれのインターフェース仕様を説明します。
| いいえ | コネクタ名 | インターフェースの説明(要約) | インターフェース仕様 |
|---|---|---|---|
| 1 | XT30UPB-F | VBAT | バッテリー電源出力(バッテリーへの直接接続) |
| 2 | XT30UPB-F | 24V | 24V/5A電源出力 |
| 3 | XT30UPB-F | 12V | 12V/5A電源出力 |
| 4 | RJ45 | 1000BASE-T | ギガビットイーサネット (GbE) |
| 5 | RJ45 | 1000BASE-T | ギガビットイーサネット (GbE) |
| 6 | タイプC | タイプC | USB3.0ホスト、5V/1.5A電源出力をサポート |
| 7 | タイプC | タイプC | USB3.0ホスト、5V/1.5A電源出力をサポート |
| 8 | タイプC | タイプC | USB3.0ホスト、5V/1.5A電源出力をサポート |
| 9 | タイプC | オルタネートモードタイプC | USB3.2ホストとDP1.4をサポート |
| 10 | 5577 | I/O出力 | 12V/3A電源出力 |
GPIOの詳細
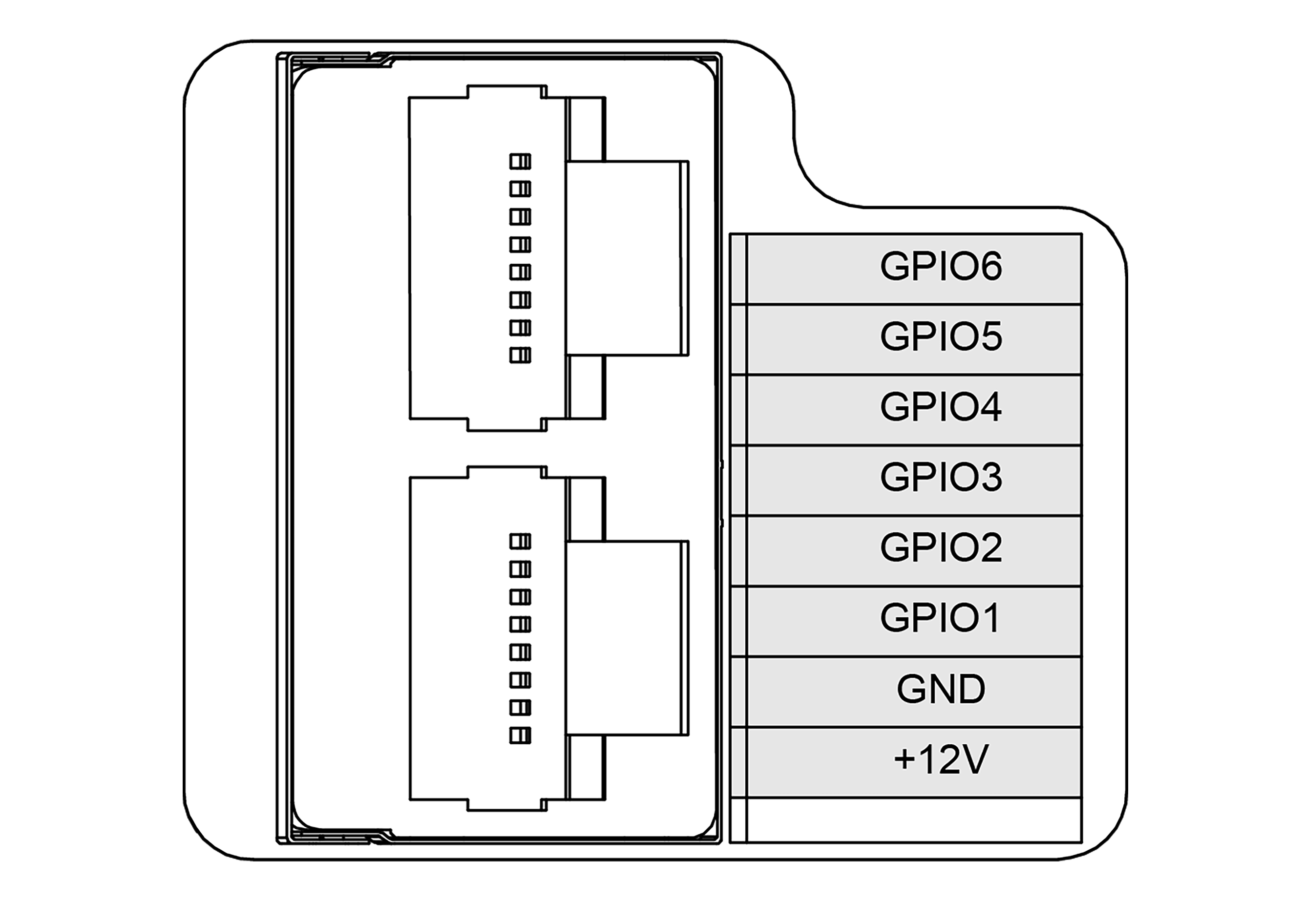
GPIO 構成については次の表を参照してください。
| GPIO番号 | NXピン番号 | 多重化関係 | Debugfs ファイルシステムのピン名 |
|---|---|---|---|
| GPIO1 | 203 | UART1_TXD | GPIO3_PR.02 |
| GPIO2 | 205 | UART1_RXD | GPIO3_PR.03 |
| GPIO3 | 232 | I2C2_SCL | GPIO3_PI.03 |
| GPIO4 | 234 | I2C2_SDA | GPIO3_PI.04 |
| GPIO5 | 128 | GPIO | GPIO3_PCC.02 |
| GPIO6 | 130 | GPIO | GPIO3_PCC.03 |
注記
NVIDIA GPIO操作は様々な方法で実行できます。NVIDIA GPIOの定義と使用方法の詳細については、以下のドキュメントを参照してください: NVIDIA Jetson開発者ガイド。
G1オンボードコンピューター
G1-EDU オンボード システムには、標準操作制御コンピューティング ユニット 1 台と開発コンピューティング ユニット 1 台が搭載されています。
開発コンピューティングユニット(PC 2)
| パラメータ | 仕様 |
| モデル | ジェットソン オリン NX |
| CPU | Arm® Cortex®-A78AE |
| コア数 | 8 |
| スレッド数 | 8 |
| 最大クロック速度 | 2GHz |
| グラフィックスメモリ | 16ギガバイト |
| 合計メモリ | 16ギガバイト |
| キャッシュ | 2 MB L2 + 4 MB L3 |
| ストレージ | 2TB |
| インテル® イメージ プロセッシング ユニット | 出席なし |
| グラフィックプロセッサ | 32 個の Tensor コアを搭載した 1024 個の NVIDIA Ampere アーキテクチャ GPU |
| 最大GPU周波数 | 918MHz |
| ガウスおよびニューラルアクセラレータ | 3.0 |
| インテル® ディープラーニングブースト | はい |
| インテル® Adaptix™ テクノロジー | はい |
| インテル® ハイパースレッディング・テクノロジー | はい |
| 命令セット | 64ビット |
| オープンGL | 4.6 |
| オープンCL | 3.0 |
| ダイレクトX | 12.1 |
| IPアドレス | 192.168.123.164 |
注意
操作・制御コンピューティングユニットはUnitreeモーション制御プログラム専用であり、一般公開はできません。開発者は開発コンピューティングユニットを二次開発目的にのみ利用できます。初期ユーザーパスワードについては、FAQをご覧ください。
表では、PC2 [開発コンピューティング ユニット]に IP アドレス192.168.123.164が割り当てられています。
CPU モジュールはより高度なバージョンで出荷される場合もありますが、パフォーマンスは上記の仕様を満たすか上回りますのでご注意ください。
G1ジョイントモーター
G1関節モーターには、優れた性能と特性を有する自社開発のUnitreeモーターを採用しています。最大トルクは120N·mで、中空軸設計を採用することで、構造の小型化と軽量化に貢献しています。さらに、デュアルエンコーダを搭載し、高精度な制御に不可欠な正確な位置と速度のフィードバックを実現します。
共同シリアル番号と制限
次の表は、ジョイント インデックス、名前、およびそれぞれのジョイント制限をラジアンで示しています。
| 索引 | 共同名義 | 限界(ラジアン) |
| 0 | L_LEG_HIP_PITCH | -2.5307 ~ 2.8798 |
| 1 | L_LEG_HIP_ROLL | -0.5236 ~ 2.9671 |
| 2 | L_LEG_HIP_YAW | -2.7576 ~ 2.7576 |
| 3 | 左足膝 | -0.087267 ~ 2.8798 |
| 4 | L_LEG_ANKLE_PITCH | -0.87267 ~ 0.5236 |
| 5 | 足首ロール | -0.2618 ~ 0.2618 |
| 6 | R_LEG_HIP_PITCH | -2.5307 ~ 2.8798 |
| 7 | R_LEG_HIP_ROLL | -2.9671 ~ 0.5236 |
| 8 | R_LEG_HIP_YAW | -2.7576 ~ 2.7576 |
| 9 | 右足膝 | -0.087267 ~ 2.8798 |
| 10 | R_LEG_ANKLE_PITCH | -0.87267 ~ 0.5236 |
| 11 | R_LEG_ANKLE_ROLL | -0.2618 ~ 0.2618 |
| 12 | ウエストヨー | -2.618 ~ 2.618 |
| 13 | ウエストロール | -0.52 ~ 0.52 |
| 14 | ウエストピッチ | -0.52 ~ 0.52 |
| 15 | L_ショルダーピッチ | -3.0892 ~ 2.6704 |
| 16 | L_ショルダーロール | -1.5882 ~ 2.2515 |
| 17 | L_肩のヨー | -2.618 ~ 2.618 |
| 18 | 左肘 | -1.0472 ~ 2.0944 |
| 19 | L_WRIST_ROLL | -1.9722 ~ 1.9722 |
| 20 | L_WRIST_PITCH | -1.6144 ~ 1.6144 |
| 21 | L_WRIST_YAW | -1.6144 ~ 1.6144 |
| 22 | R_ショルダーピッチ | -3.0892 ~ 2.6704 |
| 23 | R_ショルダーロール | -2.2515 ~ 1.5882 |
| 24 | R_肩ヨー | -2.618 ~ 2.618 |
| 25 | 右肘 | -1.0472 ~ 2.0944 |
| 26 | R_WRIST_ROLL | -1.9722 ~ 1.9722 |
| 27 | R_WRIST_PITCH | -1.6144 ~ 1.6144 |
| 28 | R_WRIST_YAW | -1.6144 ~ 1.6144 |
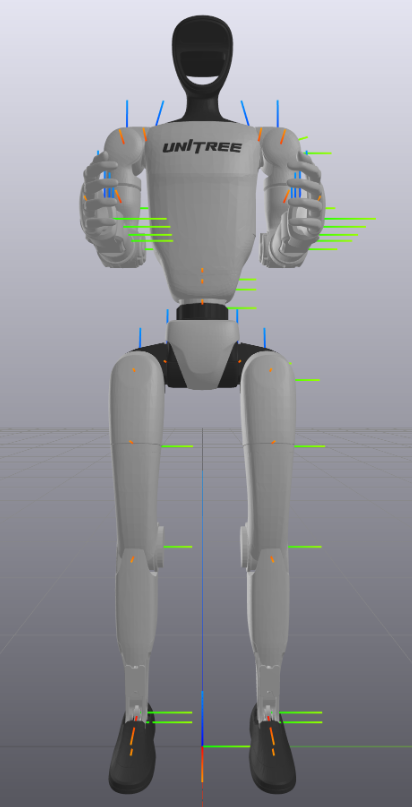
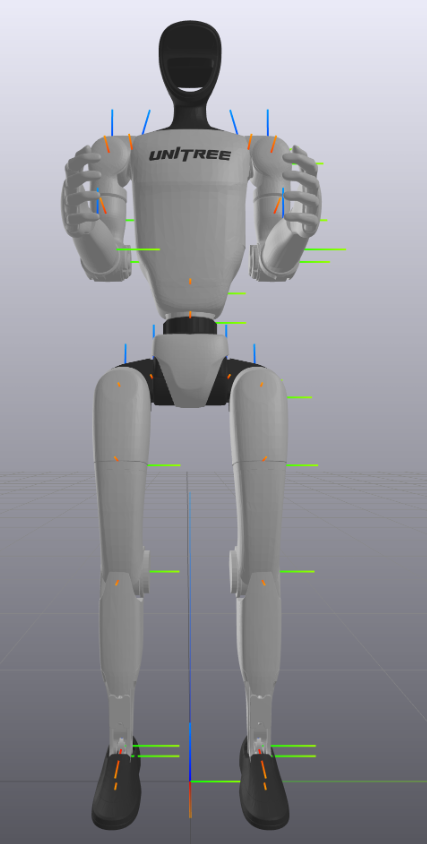
参照フレーム、関節軸、ゼロ位置
すべてのジョイントがゼロ位置にある場合、ジョイントの座標系は次のようになります。
- X軸は赤で表されます。
- Y軸は緑色で表されます。
- Z軸は青色で表されます。
G1 23 DOF
G1 29 DOF